ok so i tried SAC algo too, and the issue i have now is
(, AttributeError(“‘list’ object has no attribute ‘reshape’”,), )
So the thing is the dimensionality
“FetchReach environment has Dict observation space (because it packages not only arm position, but also the target location into the observation), and spinning up does not implement support for Dict observation spaces yet. One thing you can do is add a FlattenDictWrapper from gym (for example usage see, for instance,
Spinning Up implementations currently only support envs with Box observation spaces (where observations are real-valued vectors). These environments have Dict observation spaces, so each obs is a dict of (key, vector) pairs. If you want to test things out in these envs, I recommend doing it as a hacking project! “
I’ll have a look at the chicken images, and see how to scale them down. Maybe ffmpeg or convert or imagemagick pre-processing is better. But we’ll get there soon enough.
For some reason, pip install torch, which is what I was trying to do, kept dying. It’s a 700MB file, and top showed out of memory.
Ultimately the fix for that was:
pip install torch --no-cache-dir
(something was wrong with the cache I guess)
I also ended up deleting the contents of ~/.cache/pip which was 2.2GB. The new pip cache purge only clears wheels related libs.
Anyway, trying to do development on a 23GB chromebook with GalliumOS gets tough.
I spend a lot of time moving things around. I got myself an NVMe SSD, with 512GB to alleviate the situation.
The most common trick for looking at memory is df -h for seeing memory use, and du -h --max-depth=1 to see how big the directories are, below your current dir.
So, first thing first, the SSD doesn’t want to show up. Ah, the USB-C wasn’t pushed in all the way. Derp.
Second, to clear up some space, linux has journal logs.
pip install pyyaml==5.1
Successfully built pyyaml
Installing collected packages: pyyaml
Attempting uninstall: pyyaml
Found existing installation: PyYAML 3.12
ERROR: Cannot uninstall 'PyYAML'. It is a distutils installed project and thus we cannot accurately determine which files belong to it which would lead to only a partial uninstall.
pip3 install --ignore-installed PyYAML
Successfully installed PyYAML-5.1
Next error...
ModuleNotFoundError: No module named 'torchvision'
pip install torchvision
Next error...
AssertionError:
Found no NVIDIA driver on your system. Please check that you
have an NVIDIA GPU and installed a driver from
http://www.nvidia.com/Download/index.aspx
ok
python3 demo.py --config-file ../configs/COCO-InstanceSegmentation/mask_rcnn_R_50_FPN_3x.yaml --webcam --opts MODEL.WEIGHTS detectron2://COCO-InstanceSegmentation/mask_rcnn_R_50_FPN_3x/137849600/model_final_f10217.pkl MODEL.DEVICE cpu
[08/17 20:53:11 detectron2]: Arguments: Namespace(confidence_threshold=0.5, config_file='../configs/COCO-InstanceSegmentation/mask_rcnn_R_50_FPN_3x.yaml', input=None, opts=['MODEL.WEIGHTS', 'detectron2://COCO-InstanceSegmentation/mask_rcnn_R_50_FPN_3x/137849600/model_final_f10217.pkl', 'MODEL.DEVICE', 'cpu'], output=None, video_input=None, webcam=True)
[08/17 20:53:12 fvcore.common.checkpoint]: Loading checkpoint from detectron2://COCO-InstanceSegmentation/mask_rcnn_R_50_FPN_3x/137849600/model_final_f10217.pkl
[08/17 20:53:12 fvcore.common.file_io]: Downloading https://dl.fbaipublicfiles.com/detectron2/COCO-InstanceSegmentation/mask_rcnn_R_50_FPN_3x/137849600/model_final_f10217.pkl …
[08/17 20:53:12 fvcore.common.download]: Downloading from https://dl.fbaipublicfiles.com/detectron2/COCO-InstanceSegmentation/mask_rcnn_R_50_FPN_3x/137849600/model_final_f10217.pkl …
model_final_f10217.pkl: 178MB [01:26, 2.05MB/s]
[08/17 20:54:39 fvcore.common.download]: Successfully downloaded /root/.torch/fvcore_cache/detectron2/COCO-InstanceSegmentation/mask_rcnn_R_50_FPN_3x/137849600/model_final_f10217.pkl. 177841981 bytes.
[08/17 20:54:39 fvcore.common.file_io]: URL https://dl.fbaipublicfiles.com/detectron2/COCO-InstanceSegmentation/mask_rcnn_R_50_FPN_3x/137849600/model_final_f10217.pkl cached in /root/.torch/fvcore_cache/detectron2/COCO-InstanceSegmentation/mask_rcnn_R_50_FPN_3x/137849600/model_final_f10217.pkl
[08/17 20:54:39 fvcore.common.checkpoint]: Reading a file from 'Detectron2 Model Zoo'
0it [00:00, ?it/s]/opt/detectron2/detectron2/layers/wrappers.py:226: UserWarning: This overload of nonzero is deprecated:
nonzero()
Consider using one of the following signatures instead:
nonzero(*, bool as_tuple) (Triggered internally at /pytorch/torch/csrc/utils/python_arg_parser.cpp:766.)
return x.nonzero().unbind(1)
0it [00:06, ?it/s]
Traceback (most recent call last):
File "demo.py", line 118, in
cv2.namedWindow(WINDOW_NAME, cv2.WINDOW_NORMAL)
cv2.error: OpenCV(4.3.0) /io/opencv/modules/highgui/src/window.cpp:634: error: (-2:Unspecified error) The function is not implemented. Rebuild the library with Windows, GTK+ 2.x or Cocoa support. If you are on Ubuntu or Debian, install libgtk2.0-dev and pkg-config, then re-run cmake or configure script in function 'cvNamedWindow'
Ok...
pip install opencv-python
Requirement already satisfied: opencv-python in /usr/local/lib/python3.6/dist-packages (4.2.0.34)
Looks like 4.3.0 vs 4.2.0.34 kinda thing
sudo apt-get install libopencv-*
nope...
/opt/detectron2/detectron2/layers/wrappers.py:226: UserWarning: This overload of nonzero is deprecated:
nonzero()
Consider using one of the following signatures instead:
nonzero(*, bool as_tuple) (Triggered internally at /pytorch/torch/csrc/utils/python_arg_parser.cpp:766.)
return x.nonzero().unbind(1)
def nonzero_tuple(x):
"""
A 'as_tuple=True' version of torch.nonzero to support torchscript.
because of https://github.com/pytorch/pytorch/issues/38718
"""
if x.dim() == 0:
return x.unsqueeze(0).nonzero().unbind(1)
return x.nonzero(as_tuple=True).unbind(1)
AttributeError: 'tuple' object has no attribute 'unbind'
https://github.com/pytorch/pytorch/issues/38718
FFS. Why does nothing ever fucking work ?
pytorch 1.6:
"putting 1.6.0 milestone for now; this isn't the worst, but it's a pretty bad user experience."
Yeah no shit.
let's try...
return x.nonzero(as_tuple=False).unbind(1)
Ok next error same
/opt/detectron2/detectron2/modeling/roi_heads/fast_rcnn.py:111
Ok... back to this error (after adding as_tuple=False twice)
File "demo.py", line 118, in
cv2.namedWindow(WINDOW_NAME, cv2.WINDOW_NORMAL)
cv2.error: OpenCV(4.3.0) /io/opencv/modules/highgui/src/window.cpp:634: error: (-2:Unspecified error) The function is not implemented. Rebuild the library with Windows, GTK+ 2.x or Cocoa support. If you are on Ubuntu or Debian, install libgtk2.0-dev and pkg-config, then re-run cmake or configure script in function 'cvNamedWindow'
Decided to check if maybe this is a conda vs pip thing. Like maybe I just need to install the conda version instead?
But it looks like a GTK+ 2.x isn’t installed. Seems I installed it using pip, i.e. pip install opencv-contrib-python and that isn’t built with gtk+2.x. I can also use qt as the graphical interface.
“GTK supposedly uses more memory because GTK provides more functionality. Qt does less and uses less memory. If that is your logic, then you should also look at Aura and the many other user interface libraries providing less functionality.” (link )
I was wondering what this ‘grad_norm’ parameter is. I got sidetracked by the paper with this name, which is maybe even unrelated. I haven’t gone to the Tune website yet to check if it’s the same thing. The grad_norm I was looking for is in the ARS code.
grad_norm gets smaller as episode_reward_mean gets bigger. So, gradient normalisation… gradient normalisation… still not sure.
info = {
“weights_norm”: np.square(theta).sum(),
“weights_std”: np.std(theta),
“grad_norm”: np.square(g).sum(),
“update_ratio”: update_ratio,
“episodes_this_iter”: noisy_lengths.size,
“episodes_so_far”: self.episodes_so_far,
}
So, it’s the sum of the square of g… and g is… the total of the ‘batched weighted sum’ of the ARS perturbation results, I think… but it’s not theta… which is the policy itself. Right, so the policy is the current agent/model brains, and g would be the average of the rollout tests, and so grad_norm, as a sum of squares is like the square of variance, so it’s a sort of measure of how much weights are changing, i think.
# Compute and take a step.
g, count = utils.batched_weighted_sum(
noisy_returns[:, 0] - noisy_returns[:, 1],
(self.noise.get(index, self.policy.num_params)
for index in noise_idx),
batch_size=min(500, noisy_returns[:, 0].size))
g /= noise_idx.size
# scale the returns by their standard deviation
if not np.isclose(np.std(noisy_returns), 0.0):
g /= np.std(noisy_returns)
assert (g.shape == (self.policy.num_params, )
and g.dtype == np.float32)
# Compute the new weights theta.
theta, update_ratio = self.optimizer.update(-g)
# Set the new weights in the local copy of the policy.
self.policy.set_flat_weights(theta)
# update the reward list
if len(all_eval_returns) > 0:
self.reward_list.append(eval_returns.mean())
def batched_weighted_sum(weights, vecs, batch_size):
total = 0
num_items_summed = 0
for batch_weights, batch_vecs in zip(
itergroups(weights, batch_size), itergroups(vecs, batch_size)):
assert len(batch_weights) == len(batch_vecs) <= batch_size
total += np.dot(
np.asarray(batch_weights, dtype=np.float32),
np.asarray(batch_vecs, dtype=np.float32))
num_items_summed += len(batch_weights)
return total, num_items_summed
Well anyway. I found another GradNorm.
GradNorm
https://arxiv.org/pdf/1711.02257.pdf – “We present a gradient normalization (GradNorm) algorithm that automatically balances training in deep multitask models by dynamically tuning gradient magnitudes.”
Conclusions We introduced GradNorm, an efficient algorithm for tuning loss weights in a multi-task learning setting based on balancing the training rates of different tasks. We demonstrated on both synthetic and real datasets that GradNorm improves multitask test-time performance in a variety of scenarios, and can accommodate various levels of asymmetry amongst the different tasks through the hyperparameter α. Our empirical results indicate that GradNorm offers superior performance over state-of-the-art multitask adaptive weighting methods and can match or surpass the performance of exhaustive grid search while being significantly less time-intensive.
Looking ahead, algorithms such as GradNorm may have applications beyond multitask learning. We hope to extend the GradNorm approach to work with class-balancing and sequence-to-sequence models, all situations where problems with conflicting gradient signals can degrade model performance. We thus believe that our work not only provides a robust new algorithm for multitask learning, but also reinforces the powerful idea that gradient tuning is fundamental for training large, effective models on complex tasks.
…
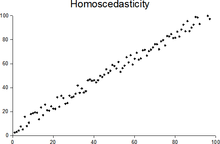
The paper derived the formulation of the multitask loss based on the maximization of the Gaussian likelihood with homoscedastic* uncertainty. I will not go to the details here, but the simplified forms are strikingly simple.
In statistics, a sequence (or a vector) of random variables is homoscedastic /ˌhoʊmoʊskəˈdæstɪk/ if all its random variables have the same finite variance. This is also known as homogeneity of variance. The complementary notion is called heteroscedasticity.
The Ray framework has this Analysis class (and Experiment Analysis class), and I noticed the code was kinda buggy, because it should have handled episode_reward_mean being NaN, better https://github.com/ray-project/ray/issues/9826 (episode_reward_mean is an averaged value, so appears as NaN (Not a Number) for the first few rollouts) . It was fixed a mere 18 days ago, so I can download the nightly release instead.
File "/usr/local/lib/python3.6/dist-packages/ray/rllib/agents/ars/ars_tf_policy.py", line 59, in compute_actions
observation = self.observation_filter(observation[None], update=update)
TypeError: list indices must be integers or slices, not NoneType
No idea yet, but some other bug mentioned something about numpy arrays vs. (good old) arrays. But anyhow, would be great if I can get ARS working on Ray/RLLib, because I just get the sense that PPO is too dumb. It’s never managed to get past falling over, with quite a bit a hyperparam tweaking.
At least ARS has evolved a walking table, so far. When it works in Ray, perhaps we will have the policy save and load, and I can move onto replaying experiences, or continuing training at a checkpoint, etc.
Huh great, well I solved my problems. and it’s running something now.
But rollouts are not ending now. Ok it looks like I need to put a time limit for the environment in the environment, rather than it being a hyperparameter like in pyBullet’s implementation.
I’m sticking to the google protobuf code that the minitaur uses, and will just need to save the best episodes, and work out how to replay them. The comments ask “use recordio?”
“