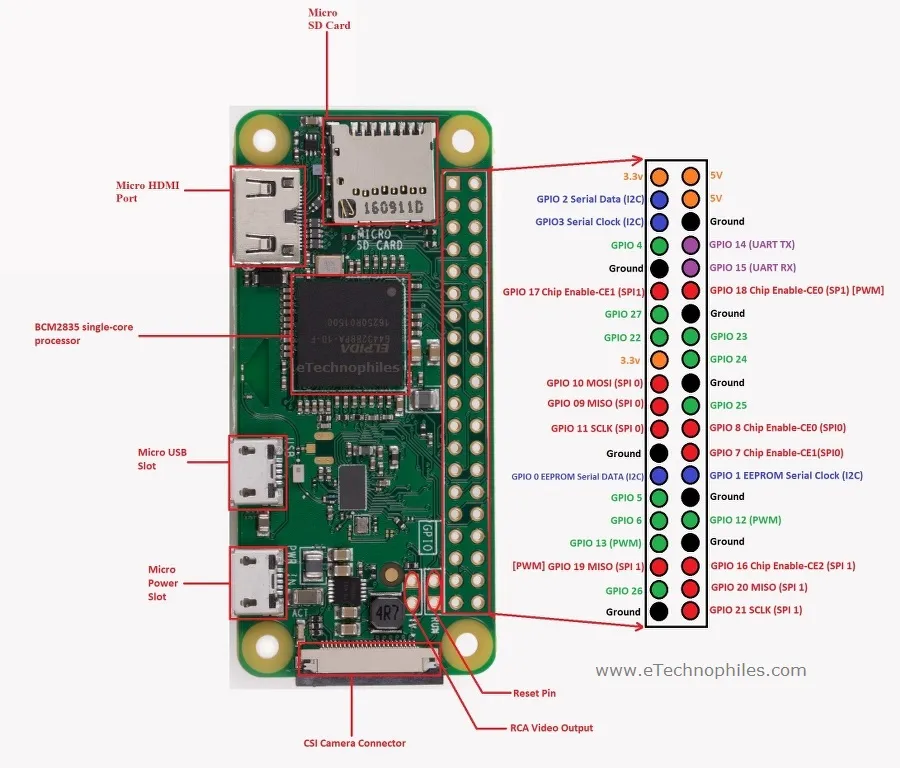
I started up a raspberry pi with raspbian installed on it. (I used balena’s etcher to flash an sd card): the light version, basically just Debian OS for rpi: https://www.raspberrypi.org/downloads/raspbian/
Ok but how do we power servos? We can’t run it off the RPi’s 5V 2A. Oh duh, there’s that big DC socket connected to the PCA9685
There is something to be said for running the robot on an Arduino. You get something robotic. You upload someone’s hexapod spider code, and it does a little dance. You can control it remotely. It can interact with sensors.
Arduinos are dirt cheap. So I bet we could have tiny neural networks running in arduinos… shit, do we already have them? Let’s see… ok wow there is like a whole thing. https://blog.arduino.cc/2019/10/15/get-started-with-machine-learning-on-arduino/ ok but 2K of RAM is not much. You would need to be a real demo scene junky to use a 2KB NN, but yeah, you could do something crudely intelligent with it.
Robots on ESP32s are definitely a thing. But ok no, Raspberry Pi for real robot. We need Linux for this.
Ok so I need to wire this up. But I also need a chassis for the robot.
open-endedness is a property of fitness landscapes, says a guy.
Banzhaf identified three different types of novelty:
(1) novelty within a model (variation), (2) novelty that changes the model (innovation), and (3) novelty that changes the meta-model5 (emergence).
NEAT and HyperNEAT
Instead of using the NEAT algorithm to evolve neural networks directly, HyperNEAT uses NEAT to evolve CPPNs. This means that more “activation” functions are used for CPPNs since things like Gaussians give rise to symmetry and trigonometric functions help with repetition of structure.
According to some blog bit: https://gitmemory.com/issue/bulletphysics/bullet3/2118/468943185 there might be an issue: “The problem with this demo is the following: It can not optimize since the robots are not properly restored. Their physical settings are not properly restored and thus their performance varies. I think it should only serve as a bullet example that does some simulation. If you can improve it to restore the physics correctly, that is fine, but this might be hard to do if you are new to bullet. It would be best to reimplement it in pybullet, because it features deterministic restoring of robots.”
So will have to keep that in mind.
So starting in the NN3DWalkersTimeWarp code, we quickly run into ERP and CFM http://www.ode.org/ode-latest-userguide.html#sec_3_7_0 – These are error reduction parameter and constraint force mixing and help fix errors caused by joints that aren’t set up perfectly.
The code also loads a number of Constraint Solvers:
btDefaultCollisionConfiguration in a btCollisionDispatcher
a default btDbvtBroadphase (a sweeping style collision detection)
and whichever solver is being used.
The Dynamics world is initiated as a btDiscreteDynamicsWorld
There’s timeWarpSimulation which we override, and the stepSimulation which is in a loop called the ‘canonical game loop’. It updates any variables changed by the UI parameters, then calls our code, and then updates and time variables that need refreshing, and gives you a chance to update some graphics. It gets to the end of the loop, checks the time, to decide whether to render the graphics, or to do the loop again.
That’s sufficient for now, to move on with the CPP file code.
Another interesting project I saw now, using OGRE, which is some other physics engine, I think, is https://github.com/benelot/minemonics – has some evolved life too.
But we are evolving something that looks more like these creepy rainbow spider bombs, that ‘we made’ in MotorDemo.cpp.
These above are the variables for the walker, which is similar to the MotorDemo critter. The code has been upgraded here and there since MotorDemo.cpp. It’s pretty great that people share their hard work so that we can just waltz on in and hack a quick robot together. This guy https://github.com/erwincoumans founded the Bullet project, and now works for Google Brain. (on Google Brain?)
So these are some of the public methods for the WalkersExample
We want to evolve behaviours based on stimulus, and the NNWalkers even have m_touchSensors, which we’ll have a look at later, to wee what they let us do.
Interlude: http://news.mit.edu/2015/algorithm-helps-robots-handle-uncertainty-0602 here says the following, and also has a video with sick drone rock music. This is a good part to remember, that either the robot is pausing, evaluating, pausing, evaluating, to accomplish the behaviours using ‘online’ feedback and offline policy processing.
There’s an offline planning phase where the agents can figure out a policy together that says, ‘If I take this set of actions, given that I’ve made these observations during online execution, and you take these other sets of actions, given that you’ve made these observations, then we can all agree that the whole set of actions that we take is pretty close to optimal,’” says Shayegan Omidshafiei, an MIT graduate student in aeronautics and astronautics and first author on the new paper. “There’s no point during the online phase where the agents stop and say, ‘This is my belief. This is your belief. Let’s come up with a consensus on the best overall belief and replan.’ Each one just does its own thing.
bool fitnessComparator(const NNWalker* a, const NNWalker* b)
{
return a->getFitness() > b->getFitness(); // sort walkers descending
}
So we are maximising fitness, and this is the Comparator function
The ratingEvaluations function orders by fitness, and prints the square root of the best performing individual’s distance fitness. Then we iterate through the walkers, update the time series canvas tick (next generation). Zero the times, and counters.
void NN3DWalkersExample::rateEvaluations()
{
m_walkersInPopulation.quickSort(fitnessComparator); // Sort walkers by fitness
b3Printf("Best performing walker: %f meters", btSqrt(m_walkersInPopulation[0]->getDistanceFitness()));
for (int i = 0; i < NUM_WALKERS; i++)
{
m_timeSeriesCanvas->insertDataAtCurrentTime(btSqrt(m_walkersInPopulation[i]->getDistanceFitness()), 0, true);
}
m_timeSeriesCanvas->nextTick();
for (int i = 0; i < NUM_WALKERS; i++)
{
m_walkersInPopulation[i]->setEvaluationTime(0);
}
m_nextReaped = 0;
}
The reap function uses the REAP_QTY (0.3) to iterate backwards through the worst 30%, set them to reaped.
void NN3DWalkersExample::reap()
{
int reaped = 0;
for (int i = NUM_WALKERS - 1; i >= (NUM_WALKERS - 1) * (1 - REAP_QTY); i--)
{ // reap a certain percentage
m_walkersInPopulation[i]->setReaped(true);
reaped++;
b3Printf("%i Walker(s) reaped.", reaped);
}
}
getRandomElite and getRandomNonElite use SOW_ELITE_QTY (set to 0.2). The functions return one in the first 20% and the last 80%.
The getNextReaped() function checks if we’ve reaped the REAP_QTY percentage yet. If not, increment counter and return the next reaped individual.
NNWalker* NN3DWalkersExample::getNextReaped()
{
if ((NUM_WALKERS - 1) - m_nextReaped >= (NUM_WALKERS - 1) * (1 - REAP_QTY))
{
m_nextReaped++;
}
if (m_walkersInPopulation[(NUM_WALKERS - 1) - m_nextReaped + 1]->isReaped())
{
return m_walkersInPopulation[(NUM_WALKERS - 1) - m_nextReaped + 1];
}
else
{
return NULL; // we asked for too many
}
}
Next is sow()…
SOW_CROSSOVER_QTY is 0.2, SOW_ELITE_PARTNER is 0.8. SOW_MUTATION_QTY is 0.5. MUTATION_RATE is 0.5. SOW_ELITE_QTY is 0.2. So we iterate over 20% of the population, increase sow count, get random elite mother, and 80% of the time, a random elite father (20% non-elite). Grab a reaped individual, and make it into a crossover of the parents.
Then mutations are performed on the population from 20% to 70%, passing in some scalar to the mutate().
Finally, the REAP_QTY – SOW_CROSSOVER_QTY is 10%, who are sown as randomized motor weight individuals.
Ok…
void NN3DWalkersExample::sow()
{
int sow = 0;
for (int i = 0; i < NUM_WALKERS * (SOW_CROSSOVER_QTY); i++)
{ // create number of new crossover creatures
sow++;
b3Printf("%i Walker(s) sown.", sow);
NNWalker* mother = getRandomElite(); // Get elite partner (mother)
NNWalker* father = (SOW_ELITE_PARTNER < rand() / RAND_MAX) ? getRandomElite() : getRandomNonElite(); //Get elite or random partner (father)
NNWalker* offspring = getNextReaped();
crossover(mother, father, offspring);
}
for (int i = NUM_WALKERS * SOW_ELITE_QTY; i < NUM_WALKERS * (SOW_ELITE_QTY + SOW_MUTATION_QTY); i++)
{ // create mutants
mutate(m_walkersInPopulation[i], btScalar(MUTATION_RATE / (NUM_WALKERS * SOW_MUTATION_QTY) * (i - NUM_WALKERS * SOW_ELITE_QTY)));
}
for (int i = 0; i < (NUM_WALKERS - 1) * (REAP_QTY - SOW_CROSSOVER_QTY); i++)
{
sow++;
b3Printf("%i Walker(s) sown.", sow);
NNWalker* reaped = getNextReaped();
reaped->setReaped(false);
reaped->randomizeSensoryMotorWeights();
}
}
Crossover goes through the joints, and sets half of the motor weights to the mom and half to the dad, randomly.
void NN3DWalkersExample::crossover(NNWalker* mother, NNWalker* father, NNWalker* child)
{
for (int i = 0; i < BODYPART_COUNT * JOINT_COUNT; i++)
{
btScalar random = ((double)rand() / (RAND_MAX));
if (random >= 0.5f)
{
child->getSensoryMotorWeights()[i] = mother->getSensoryMotorWeights()[i];
}
else
{
child->getSensoryMotorWeights()[i] = father->getSensoryMotorWeights()[i];
}
}
}
mutate() takes a mutation rate, and randomizes motor weights at that rate.
void NN3DWalkersExample::mutate(NNWalker* mutant, btScalar mutationRate)
{
for (int i = 0; i < BODYPART_COUNT * JOINT_COUNT; i++)
{
btScalar random = ((double)rand() / (RAND_MAX));
if (random >= mutationRate)
{
mutant->getSensoryMotorWeights()[i] = ((double)rand() / (RAND_MAX)) * 2.0f - 1.0f;
}
}
}
“Over the past five years, engineers and poultry scientists at The University of Georgia and Georgia Institute of Technology have been collaborating to help farmers like Mitchell make better use of the information latent in chicken chatter. In a series of studies published between 2014 and 2016, Georgia Tech research engineer Wayne Daley and his colleagues exposed groups of six to 12 broiler chickens to moderately stressful situations—such as high temperatures, increased ammonia levels in the air and mild viral infections—and recorded their vocalizations with standard USB microphones. They then fed the audio into a machine-learning program, training it to recognize the difference between the sounds of contented and distressed birds.”
For now, just pasting links to libraries and stuff.
Let’s see how far we can get without installing Anaconda. It’s like 500MB, and we might not use any of it. Miniconda seems to be the light weight version.
Chickens make these calls for air and ground predators: